Abstract
Time synchronization is crucial in distributed network systems to ensure the correct order of events and data reliability, with direct impacts on logging, security, fault diagnosis, and distributed control. The ATS protocol proposes a distributed synchronization model based on skew and offset estimation and compensation but has limitations in handling communication delays and scalability. RoATS improves upon ATS by introducing delay compensation mechanisms and asynchronous algorithms, enhancing robustness and accuracy even in large-scale networks with variable delays.
The goal of the dATS protocol is to develop an autonomous, scalable, and resilient synchronization method capable of managing latency, noise, and topological complexities typical of multi-hop distributed networks.
dATS: Dynamic Average Time Syncronization
Lorenzo Grillo, Pierpaolo Sestito
September 15, 2025
Introduction
Time synchronization plays a fundamental role in the correct operation of distributed network systems. Precise time alignment enables the preservation of the chronological order of events and ensures accurate recording of information.
- Accuracy and consistency of system logs
- Fault diagnosis and recovery
- Security and authentication
- Distributed processing
Benefits of effective time synchronization
However, time synchronization in distributed systems represents a complex challenge due to multiple technical factors. These include network latency variability, multihop architectures, interference and noise in transmission channels, as well as differences between skew (variations in hardware clock rates) and drift (differences in clock start times). Effective management of these factors is essential to ensure reliable time synchronization. The geographic distribution of nodes and the communication between these devices make synchronization even more complex and critical.
Synchronization in DCS is achieved through:
- Real-time monitoring and adjustment
- Consistency and precision in control actions
ATS Overview
ATS defines a model for the temporal alignment of all nodes belonging to the same network with respect to a common parameter called the “network time.” All nodes become active, meaning capable of communication, only after synchronizing to the network time within a minimal time window necessary to correct the local time relative to the network time. This window is defined as the “network period,” which determines the frequency at which the network can perform its functions.
ATS: Protocol
ATS adopts a distributed and non-hierarchical topology, increasing the network’s robustness and adaptability. It is structured into three main phases:
- Relative skew estimation: Each node estimates the ratio of its clock speed relative to each of its neighbors.
- Skew compensation: After estimating the relative skews, each node updates its virtual clock speed (skew) by averaging it with the values of its neighbors.
- Offset compensation: Nodes use a consensus algorithm to reduce the differences between the virtual clocks of neighboring nodes by iteratively updating each node’s offset.
Although ATS overcomes the limitations of traditional approaches, it has some drawbacks:
- Lack of communication delay management: The ATS protocol assumes an ideal condition where communication between nodes is instantaneous, ignoring transmission delays and making delays inevitable.
- Sensitivity to connection quality: In real networks, characterized by packet loss and topology changes, ATS performance can degrade.
- Limited scalability in large networks: In large-scale networks, the synchronization precision of ATS can decrease due to an increase in hop counts
Robust Average Time Synchronization
The model proposed by Lamonaca and his research group (2015) introduces a more resilient version of the ATS protocol. RoATS adapts to complex and dynamic scenarios, enabling greater scalability compared to ATS. Through communication delay compensation mechanisms, it maintains synchronization accuracy even in larger-scale networks. Additionally, RoATS incorporates specific methods to ensure precise synchronization despite random packet transmission delays.
In conclusion, RoATS is designed to provide reliable time synchronization in
distributed environments with variable delays, significantly enhancing robustness over ATS. It relies on two distinct asynchronous consensus algorithms: one for skew compensation and another for temporal offset compensation among nodes. These algorithms enable RoATS to maintain precise synchronization even in the presence of limited communication delays, making it robust and suitable for real-world network conditions.
Dynamic Average Time Synchronization
Our goal is to develop a protocol that stands out from traditional approaches by adopting a non-hierarchical model for more scalable and autonomous synchronization.
Goals
- Elimination of node hierarchy: Each node becomes autonomous in the synchronization process, with no need for central coordinators.
- Adaptive and resilient synchronization: Ensures precise synchronization even under changing network conditions.
- Latency and noise management: Addresses typical challenges of latency and noise in distributed networks and noisy communication channels.
- Support for complex and multi-hop networks: Enables effective synchronization even in large-scale, multi-hop distributed networks.
Let’s define the concept of a timestamp. In RoATS, a node’s timestamp is derived by adjusting its hardware clock using two parameters: skew, which scales the clock rate, and drift, which represents the initial offset. The resulting software clock is defined as:
software clock = hardware clock × skew + drift
In the case of dATS, which is designed to operate across heterogeneous hardware and operating systems, direct access to the hardware clock is not feasible.
Instead, it relies on the software clock provided by the operating system’s API.
Consequently, dATS compensates only for drift differences between nodes, without modifying the hardware clock or the skew.
The synchronization protocol adopted by dATS employs a four-stage state
machine with the following flow:
- Stage 1: The first node sends a dATS synchronization packet containing its current drift value.
- Stage 2: The second node receives the packet and adjusts its local drift to align its timestamp with that of the sender. This is done using an exponential low-pass filter, which updates the drift by also taking into account the average of the communication delays between the two nodes. The newly computed local drift value is then sent back to the first node.
- Stage 3: The first node checks whether the difference between the two timestamps (∆T) exceeds the max error permitted inside the network. If ∆T is below this threshold, the node proceeds to Stage 4. Otherwise, it restarts the synchronization by sending a Stage 1 packet, and the process repeats until ∆T falls below the threshold.
- Stage 4: Reaching this stage indicates that the timestamp error ∆T is within acceptable limits. The node finalizes the synchronization process by saving the updated drift value.
The upper bound, denoted as ϵ, is configured by the developer during the network setup. A smaller ϵ results in more precise and temporally secure synchronization. After synchronization, ϵ becomes dynamic, adjusting according to the network’s timing requirements at time t. In dynamic mode, ϵ is updated using the following formula:
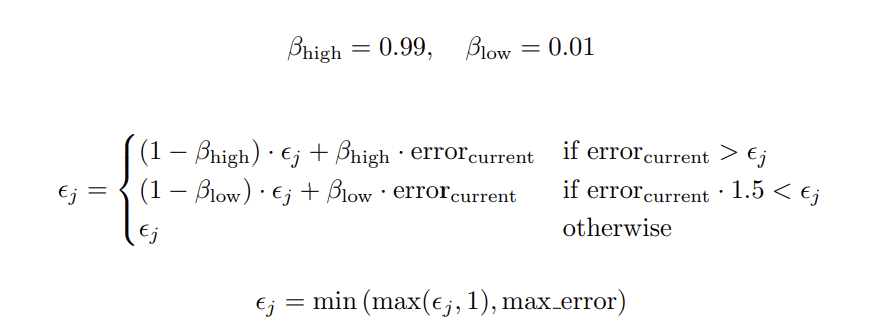
where max error is the maximum allowable synchronization error, as defined by the configuration of the oldest node inside the network.